-
О компании

Prilan - Международный Каталог патентных специалистов

Для клиентов: удобный поиск исполнителя в любом регионе

Для патентных специалистов: Поиск коллег в смежных областях и регионах

Бесплатные консультации по вопросам интеллектуальной собственности

Помощь в оказании услуг по защите интеллектуальной собственности

Поиск исполнителя на оказание услуг по защите интеллектуальной собственности

Бесплатные консультации по вопросам защиты изобретений

Оказание услуг по качественному оформлению прав на изобретения

Помощь в продаже изобретения и привлечения инвестора
Публикация профиля специалиста и его компетенций

Поиск заказчиков на услуги по защите интеллектуальной собственности

Удобное взаимодействие с коллегами из смежных областей и других стран
Патентование Услуги по Изобретениям, Полезным моделям, Промышленным образцам

Регистрация Услуги по Товарным знакам, Программному обеспечению, Авторскому праву
Исследования Услуги по Исследованиям по ГОСТ, Патентному поиску, Оценке, Разработке

Суды и споры Услуги по Защите в СИП, ФАС, Арбитраже, Аннулированию в ППС, Экспертиза
-
Услуги
 Регистрация товарного знака
Международная регистрация товарного знака (торговой марки)
Внесение и регистрация товарного знака в ТРОИС
Ускоренная регистрация товарного знака
Продление действия товарного знака
Регистрация лицензионного договора
Ответы на Уведомления при регистрации ТЗ
Регистрация программ для ЭВМ
Регистрация ПО и ПАК в Минцифры
Калькулятор стоимости регистрации товарного знака - торговой марки, логотипа, торгового знака
Калькулятор расчёта стоимости международной регистрации товарного знака по Мадридской системе
Патентование изобретений - регистрация патента в РФ
Патентование полезной модели - регистрация патента в РФ
Патентование промышленного образца - патент на внешний вид
Ускоренное патентование
Калькулятор расчёта стоимости патентования изобретения, полезной модели, промышленного образца
Международное патентование
Патентование промышленного образца в Евразии (ЕАПО)
Патентование изобретения в Евразии (ЕАПО)
Патентование и Регистрация интеллектуальной собственности
Проведение патентного исследования Патентные исследования на патентную чистоту Патентно-информационный поиск Оценка стоимости интеллектуальной собственности Оценка патента на изобретение, полезную модель, промышленный образец Оценка стоимости товарного знака Оценка программно-аппаратного комплекса, программ ЭВМ Разработка и регистрация технических условий (ТУ) Разработка и создание нематериального актива для компании (НМА)
Регистрация товарного знака
Международная регистрация товарного знака (торговой марки)
Внесение и регистрация товарного знака в ТРОИС
Ускоренная регистрация товарного знака
Продление действия товарного знака
Регистрация лицензионного договора
Ответы на Уведомления при регистрации ТЗ
Регистрация программ для ЭВМ
Регистрация ПО и ПАК в Минцифры
Калькулятор стоимости регистрации товарного знака - торговой марки, логотипа, торгового знака
Калькулятор расчёта стоимости международной регистрации товарного знака по Мадридской системе
Патентование изобретений - регистрация патента в РФ
Патентование полезной модели - регистрация патента в РФ
Патентование промышленного образца - патент на внешний вид
Ускоренное патентование
Калькулятор расчёта стоимости патентования изобретения, полезной модели, промышленного образца
Международное патентование
Патентование промышленного образца в Евразии (ЕАПО)
Патентование изобретения в Евразии (ЕАПО)
Патентование и Регистрация интеллектуальной собственности
Проведение патентного исследования Патентные исследования на патентную чистоту Патентно-информационный поиск Оценка стоимости интеллектуальной собственности Оценка патента на изобретение, полезную модель, промышленный образец Оценка стоимости товарного знака Оценка программно-аппаратного комплекса, программ ЭВМ Разработка и регистрация технических условий (ТУ) Разработка и создание нематериального актива для компании (НМА) - Специалисты
-
Инфо

Продажа товарного знака Новатор кофе
Классы: 30, 43
Цена: договорная

Продажа товарного знака Жажда Странствий
Классы: 3, 9, 16, 18, 20...
Цена: договорная

Продажа товарного знака ФитоЛавка
Классы: 5, 20, 21, 30, 35
Цена: договорная

Уникальная технология конструкции беседки
Авторские произведения
Отчуждение
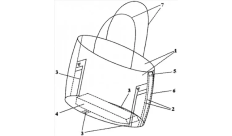
Универсальная сумочка с FOLED-дисплеем
Полезная модель
Лицензия

ИС CloudRepairs по планированию и организации
Авторские произведения
Отчуждение
Инструменты для классификации ИС
- Классификатор МПК - Международная патентная классификация
- Классификатор МКТУ - Международная классификация товарных знаков и услуг
- Классификатор МКПО - Международная классификация промышленных образцов
- Классификатор ЕСКД - Единая система конструкторской документации
- Классификатор ОКВЭД2 - Общероссийская классификация видов экономической деятельности
- Классификатор ПАК - Классификация программно-аппаратных комплексов
- Классификатор ПО - Классификация программного обеспечения
Prilan - Официальный партнёр Сбербанка России

Адрес:
123610 г. Москва, Краснопресненская набережная, д.12
ЦМТ Москвы - Центр международной торговли
График работы:
09:00-18:00 - ПН-ПТ
Выходные - СБ-ВС
























Патент №168678 Индикатор истинной вертикали и времени вертикальной качки центра ВППл


Вид объекта: Полезная модель
Вид регистрации: Патент
Цена: 337 000 р.
Продавец: Олег Вячеславович Резниченко
Телефон: +7 (xxx)xxx-xx-xx
E-mail: xxxx@xxxx.ru
Изображения:
Дата начала отсчета срока действия патента:
28.04.2016
Приоритет(ы):
(22) Дата подачи заявки: 28.04.2016
(45) Опубликовано: 15.02.2017 Бюл. № 5
(56) Список документов, цитированных в отчете о поиске: RU 153655 U1, 27.07.2015. RU 2376211 C2, 20.12.2009. RU 2506654 C2, 10.02.2014. US 2013141255 A1, 06.06.2013.
Адрес для переписки:
140185, Московская обл., г. Жуковский-5, а/я 2563, Акционерное общество Научно-технический центр "Альфа-М", А.Е. Цветкову
(72) Автор(ы):
Тяпченко Юрий Александрович (RU),
Икрянов Игнат Иванович (RU),
Тяпченко Павел Юрьевич (RU),
Хан Александр Олегович (RU)
(73) Патентообладатель(и):
Акционерное общество Научно-технический центр "Альфа-М" (RU)
(54) Индикатор истинной вертикали и времени вертикальной качки центра ВППл.
(57) Реферат:
Полезная модель относится к авиационной технике, преимущественно морской авиации, и может быть использована для обеспечения визуальной посадки вертолета на корабельные взлетно-посадочные площадки ВППл в сложных метеоусловиях ночью за счет увеличения объема и качества информации о качках морского корабля, представляемой летчику внекабинными средствами отображения на этапе приземления (причаливания к ВППл).
Техническим результатом предлагаемого решения является повышение функциональной возможности индикатора и безопасности приземления вертолета особенно ночью в условиях качки корабля за счет введения в него экрана светодиодного цветного прямоугольной формы, вытянутой по вертикали, и отображения на его информационном поле указателя истинной вертикали и индикатора времени вертикальной качки центра ВППл с отображением на нем информации, необходимой летчику для определения направления вертикальной качки центра ВППл, времени качки от впадины волны до ее вершины и наоборот и принятия решения о причаливании вертолета на ВППл.
Техническое решение относится к авиационной технике, преимущественно морской авиации, и может быть использовано для обеспечения визуальной посадки вертолета на корабельные взлетно-посадочные площадки ВППл в сложных метеоусловиях ночью за счет увеличения объема и качества информации о качках корабля, представляемой летчику внекабинными средствами отображения.
Известно, что посадка вертолета на качающуюся корабельную ВППл для летчика является наиболее напряженным этапом полета. Объясняется это тем, что он должен совместить 6 степеней свободы вертолета с шестью степенями свободы ВППл.
Известны в основном два направления повышения безопасности посадки вертолета на корабельные качающиеся ВППл: первое - это автоматизация процесса приземления вертолета за счет применения механических систем сцепки вертолета с палубой корабля и последующего притягивания и фиксации вертолета к палубе, и второе - это повышение уровня информационного обеспечения летчика при визуальном способе приземления вертолета на корабельные ВППл.
Многие типы вертолетов морского базирования не имеют механических средств причаливания, поэтому проблемы посадки здесь решаются по второму пути.
Известен световой указатель крена и дифферента (см., Ю.Г. Басов, 1993, Светосигнальные устройства, Москва, Транспорт, стр. 269-270, 309), применение которого направлено на повышение безопасности посадки вертолета на корабельные ВППл на этапе приземления. Устройство имеет блок индикации крена с встроенными в него двухразрядным цифровым индикатором значений крена и двумя сигнализаторами - сигнализатора направления крена влево и сигнализатора направления крена вправо; блок индикации дифферента и вертикального перемещения с встроенными в него пятью сигнализаторами - сигнализаторов движения палубы вниз, вверх, запрета посадки, направления дифферента вверх и вниз, и одноразрядного цифрового индикатора значений дифферента.
Устройство работает следующим образом.
При качке ВППл влево на блоке индикации крена загорается сигнализатор направления качки влево, соответственно, при качке вправо - сигнализатор направления крена вправо. На цифровом индикаторе индицируется абсолютное значение величины бортовой качки в градусах.
При движении ВППл вверх (по вертикали) на блоке индикации дифферента и вертикального перемещения загорается сигнализатор движения палубы вверх, а при ее движении вниз - сигнализатор движения палубы вниз.
При дифференте вниз загорается сигнализатор дифферента вниз, при дифференте вверх - сигнализатор дифферента вверх. При запрете посадки включается сигнализатор запрета посадки.
Основным недостатком этого устройства является форма представления информации. Так, летчик, используя сигнализаторы и цифровые индикаторы, с трудом может определить время до начала изменения направлений движения по крену и дифференту. Еще с большим затруднением он может определить время до начала изменения направления движения ВППл по высоте.
Наиболее важным недостатком данного устройства является отсутствие внекабинной световой индикации, необходимой летчику для определения положения вертолета в земной системе координат, т.е. отсутствие индикации истинного горизонта или истинной вертикали. Отсутствие такой индикации при ночной посадке в сложных метеоусловиях (СМУ), как правило, вызывает у летчиков иллюзию, которая приводят к раскачке вертолета и, соответственно, к летным происшествиям или к катастрофам.
Имеются другие патенты и заявки на полезные модели, в которых предлагаются способы и средства информационного обеспечения летчика при посадке на корабельную ВППл, например такие, как: индикатор вертикального перемещения корабельный взлетно-посадочной площадки, патент RU №123200 МПК G08G 05/02, публикация от 20.12.2012; Способ отображения информации о вертикальном перемещении корабельной взлетно-посадочной площадки при посадке вертолета на корабль; патент RU №2506654 МПК G09G 03/20, публикация от 10.02.2014; Индикатор положения взлетно-посадочной площадки корабельный, патент RU №154199 МПК G08G 05/02, публикация от 20.08.2015; Индикатор положения взлетно-посадочной площадки корабельный, заявка на полезную модель RU №2014.148690 от 03.12.2014; Индикатор положения взлетно-посадочной площадки корабельный, заявка на полезную модель RU №2015.125984 от 30.06.2015.
Среди них в наибольшей степени отвечает требованиям информационного обеспечения летчика при посадке на ВППл индикатор посадочный палубный (см., патент RU 153655 МПК G08G 05/02, публикация от 27.07.2015), содержащий электромеханический указатель истинного горизонта УИГ, состоящий из блока одноосной стабилизации (БОС) и световой планки указателя истинного горизонта (ПУИГ); экран светодиодный цветной (ЭСЦ); промышленный компьютер, который с одной стороны подключен по мультиплексным линиям связи к корабельной навигационной системе, а с другой к БОС, ПУИГ и ЭСЦ.
Все устройства подключены к корабельному источнику питания.
ЭСЦ имеет световое светодиодное цветное информационное поле, в которое встроены информационные поля: поле индикатора направления и величины крена с отображением на нем символа текущего значения крена; поле индикатора направления и величины дифферента с отображением на нем символа текущего значения дифферента при его движении вниз и символа текущего значения дифферента при его движении вверх; поле индикатора направления и величины вертикального перемещения взлетно-посадочной площадки с отображением на нем символа текущего положения центра ВППл при его движении вверх и символа текущего положения центра ВППл при его движении вниз, поле цифровой индикации располагаемого летчиком времени для принятия им решения на выполнение операции причаливания (касания) вертолета к взлетно-посадочной площадке.
Индикатор обеспечивает отображение размаха и периода трех видов качки, а также индикацию истинного горизонта и времени, оставшегося до занятия горизонтального положения ВППл при движении ее вниз и положении по крену и дифференту, близкому к нулю.
Таким образом, рассматриваемый индикатор обеспечивает летчика информацией о всех параметрах качки и, кроме этого, предоставляет летчику возможность выполнения посадки в автоматизированном режиме, используя только цифровой индикатор и указатель истинного горизонта.
К недостаткам этого индикатора следует отнести пространственно разнесенное представление информации, необходимой летчику для оценки положения вертолета относительно ВППл, и невозможность использования УИГ непосредственно при причаливании к ВППл, так как летчик в этот момент смотрит вниз и таким образом световая планка УИГ выходит из его поля зрения. Вторым важным недостатком является наличие цифрового индикатора, мелькание цифр которого отвлекает внимание летчика от процесса причаливания.
Задачей полезной модели является устранение недостатков вышеуказанного индикатора.
Техническим результатом предлагаемого решения является обеспечение летчика информацией, необходимой летчику для ориентации в пространстве при перемещении вертолета с верхней точки над ВППл при посадке до его причаливания к ВППл и повышения информативности индикатора располагаемого летчиком времени для принятия им решения на выполнение операции причаливания (касания) вертолета к взлетно-посадочной площадке за счет введения аналогового индикатора времени перемещения центра ВППл снизу вверх или сверху вниз, прогнозируемых значений времени разрешения или запрета причаливания, что позволяет летчику определять время, остающееся у него до причаливания.
Технический результат достигается тем, что индикатор истинной вертикали и вертикального перемещения, содержащий экран светодиодный цветной с пиксельной структурой матрицы, в информационное поле которого встроены в верхней части экрана информационное поле шкалы индикатора бортовой качки, информационное поле индикатора располагаемого времени летчиком для принятия решения на причаливание вертолета на ВППл, световую планку ориентации летчика в пространстве при посадке на корабельную ВППл, промышленный компьютер с встроенным в него вычислительным блоком, который с одной стороны подключен с помощью проводной линии связи к корабельной навигационной системе, которая обеспечивает выдачу текущих значений параметров бортовой, килевой и вертикальной качек, и с другой - к экрану светодиодному цветному и в вычислительный блок которого встроены программно-вычислительные модули: модуль задания уровней яркости светодиодов светового экрана, модуль формирования шкалы индикатора бортовой качки и экран и пульт подключены к источникам электропитания, причем световая планка ориентации летчика в пространстве при посадке на корабельную ВППл выполнена в виде световой планки указателя истинной вертикали, расположена на информационном поле экрана вертикально и для ее формирования и управления угловым положением в вычислительный блок пульта введены программно-вычислительные модули: модуль формирования световой планки указателя истинной вертикали, модуль преобразования информации, поступающей от навигационной системы, в сигналы управления угловым положением световой планки указателя истинной вертикали, информационное поле индикатора располагаемого времени летчиком для принятия решения на причаливание вертолета на ВППл выполнен в виде прямоугольного информационного поля индикатора времени вертикальной качки центра ВППл и в него встроены: символ индикации текущего значения времени вертикальной качки центра ВППл при движении вниз, символ индикации текущего значения времени вертикальной качки центра ВППл при движении вверх, световая линия индикации прогнозируемой величины времени вертикального перемещения центра ВППл от впадины до вершины волны, световая линия индикации прогнозируемой величины времени вертикального перемещения центра ВППл от вершины до впадины волны, а в вычислительный блок пульта введены программно-вычислительные модули: модуль формирования световой планки указателя истинной вертикали, модуль преобразования информации, поступающей от навигационной системы, в сигналы управления угловым положением световой планки указателя истинной вертикали, модуль формирования информационного поля индикатора времени вертикальной качки центра ВППл, модуль формирования символа индикации текущего времени вертикальной качки центра ВППл при движении вниз и управления его положением по высоте, модуль формирования символа индикации текущего времени вертикальной качки центра ВППл при движении вверх и управления его положением, модуль формирования световой линии индикации прогнозируемой величины времени перемещения от впадины до вершины, модуль формирования световой линии индикации прогнозируемой величины времени перемещения от вершины до впадины.
В информационное поле экрана в нижней его части дополнительно встроено информационное поле шкалы индикации бортовой качки и шкала индикатора бортовой качки а в вычислительный блок пульта введен программно-вычислительный модуль формирования нижней шкалы индикатора бортовой качки.
Сравнение предлагаемого решения с известными техническими решениями показывает, что оно обладает новой совокупностью существенных признаков, которые совместно с известными признаками позволяют успешно реализовать поставленную цель.
На фиг. 1 показана структурная схема индикатора истинной вертикали и времени вертикальной качки центра ВППл (ИИВиВрП).
На фиг. 2 показана схема расположения информационных полей индикатора и их элементов в исходном состоянии после включения питания.
На фиг. 3 показана схема расположения информационных полей индикатора и их элементов при наклоне корабля влево и движении центра ВППл вниз.
На фиг. 4 показана схема расположения информационных полей индикатора и их элементов при наклоне корабля вправо и движении ВППл вверх.
На фиг. 5 показана схема расположения информационных полей индикатора и символов индикации текущего значения времени перемещения центра ВППл при его движении вниз и вверх в диапазоне малых периодов бортовой качки независимо от направления этого перемещения.
На фиг. 6 показана условная траектория движения центра ВППл и показана разметка по времени движения от одной точки к другой.
Обозначения к фигурам:
1. Экран светодиодный цветной.
1.1. Информационное поле экран.
1.1.1, 1.1.1а. Информационные поля шкал индикаторов бортовой качки верхнее и соответственно нижнее.
1.1.1.1, 1.1.1.1а. Шкалы индикаторов бортовой качки верхняя и соответственно нижняя.
1.1.2. Световая планка указателя истинной вертикали.
1.1.3. Информационное поле индикатора вертикального перемещения центра ВППл.
1.1.3.1. Символ индикации текущего значения высоты центра ВППл при движении вниз.
1.1.3.2. Символ индикации текущего значения высоты центра ВППл при движении вверх.
1.1.3.3. Световая линия индикации прогнозируемого положения вершины волны.
1.1.3.4. Световая линия индикации прогнозируемого положения впадины волны.
1.2. Блок управления и регулировки яркости светодиодов.
2. Пульт управления на базе промышленного компьютера.
2.1. Вычислительный блок пульта.
2.1.1. Программно-вычислительные модули.
2.1.1.1, 2.1.1.1а. Модули формирования шкал индикаторов бортовой качки верхнего и соответственно нижнего.
2.1.1.2. Модуль формирования световой планки указателя истинной вертикали.
2.1.1.3. Модуль преобразования информации, поступающей от навигационной системы, в сигналы управления угловым положением световой планки указателя истинной вертикали.
2.1.1.4. Модуль формирования символа индикации текущего положения центра ВППл по высоте при движении ВППл вниз и управления его положением по высоте.
2.1.1.5. Модуль формирования световой линии индикации прогнозируемого значения впадины волны.
2.1.1.6. Модуль формирования символа индикации текущего положения центра ВППл по высоте при движении ВППл вверх и управления его положением по высоте.
2.1.1.7. Модуль формирования световой линии индикации прогнозируемого значения вершины волны.
2.1.1.8. Модуль задания уровней яркости светодиодов.
2.1.1.9. Модуль формирования информационного поля индикатора вертикального перемещения центра ВППл.
3. Корабельная навигационная система (не входит в состав индикатора).
4. Источник электропитания (не входит в состав индикатора).
Обозначения к фиг. 6.
a) Вершина траектории (верхняя точка) движения центра ВППл.
b) Впадина траектории (нижняя точка) движения центра ВППл.
c) Точка на траектории, начиная с которой возможно причаливание вертолета к ВППл.
d) Точка на траектории, начиная с которой причаливание вертолета к ВППл опасно.
e) Точка на траектории, начиная с которой вновь возможно причаливание вертолета к ВППл.
Hм - высота вертикальной качки,
t - текущее время.
T1 - величина времени, благоприятного для причаливания вертолета.
Т2 - величина времени, не благоприятного для причаливания вертолета.
Индикатор работает следующим образом.
Индикатор состоит из ЭСЦ 1 и пульта управления 2 на базе промышленного компьютера. Источником данных о параметрах качки является бортовая навигационная система 3. Данные о размещении центра ВППл относительно центра качки корабля и строительных осей корабля вводятся в компьютер при привязке изделия к конкретному кораблю или судну. Пульт 2 и ЭСЦ 1 и пульт 2 и корабельная навигационная система 3 соединены с помощью мультиплексных проводных линий связи.
После подачи электропитания от корабельного источника питания 4 на информационном поле 1.1 экрана 1 загораются все элементы индикации в соответствии с фиг. 2 с учетом ограничений, которые заданы исходно в виде размеров и формы информационных полей 1.1.1, 1.1.1а, 1.1.2, 1.1.3 и формы и цвета символов индикации текущего значения времени вертикальной качки центра ВППл при движении вниз 1.1.3.1 и движении вверх 1.1.3.2, световой линии индикации 1.1.3.3 прогнозируемой величины времени вертикального перемещения ВППл при движении от впадины (точка 2 (4) на фиг. 6) до вершины (точка 5 на фиг. 6), световой линии индикации 1.1.3.4 прогнозируемой величины времени вертикального перемещения ВППл при движении от вершины (точка 1 (3) на фиг. 6) до впадины (точка 2 (4) на фиг. 6). Все вышеперечисленные элементы индикации задаются программно-вычислительными модулями 2.1.1.1, 2.1.1.1а, 2.1.1.2, 2.1.1.4, 2.1.1.5, 2.1.1.6, 2.1.1.7, 2.1.1.8, 2.1.1.9 блока программно-вычислительных модулей 2.1.1 вычислительного блока 2.1 пульта 2.
При отсутствии какой-либо качки индикатор 1 сохраняет вертикальное положение в земной системе координат, от навигационной системы 3 поступают нулевые значения параметров качки, в вычислительном блоке 2.1 эти данные обрабатываются и преобразовываются в управляющие сигналы, в соответствии с которыми планка индикатора истинной вертикали 1.1.2 сохраняет вертикальное положение, символы индикации текущего значения времени вертикальной качки центра ВППл при движении вниз 1.1.3.1 и вверх 1.1.3.2 выключаются, Световые линии индикации прогнозируемых величин времени вертикального перемещения центра ВППл от впадины до вершины 1.1.3.3 и от вершины до впадины 1.1.3.4 сближаются к центру индикатора и остаются включенными, как показано на фиг. 5, в пределах заданной для каждого типа вертолета зоны "нечувствительности" к вертикальной качке центра ВППл.
При наличии бортовой качки от навигационной системы 3 поступают сигналы о ее величине, которые модулем 2.1.1.3 в вычислительном блоке 2.1 преобразовываются в сигналы управления световой планки указателя истинной вертикали 1.1.2 и планка отклоняется в сторону, противоположную направлению качки, сохраняя тем самым для летчика свое вертикальное положение.
При качке только по дифференту экран 1 и планка 1.1.2 сохраняют вертикальное положение, но при этом начинают работать программно-вычислительный модуль 2.1.1.5 формирования и управления символом 1.1.3.1 индикации текущего значения времени вертикальной качки центра ВППл при движении вниз и модуль 2.1.1.7 формирования и управления световой линией 1.1.3.4 индикации прогнозируемой величины времени вертикального перемещения центра ВППл от вершины (точка a {c} на фиг. 6) до впадины (точка b {d} на фиг. 6) при движении ВППл вниз. Таким образом определяется амплитуда времени вертикальной качки при движении вниз-время T1 на фиг. 6.
При изменении направления движения начинают работать программно-вычислительный модуль 2.1.1.6 формирования и управления символом 1.1.3.2 индикации текущего значения времени вертикальной качки центра ВППл при движении вверх и модуль 2.1.1.8 формирования и управления световой линией 1.1.3.3 индикации прогнозируемой величины времени вертикального перемещения центра ВППл от впадины (точка b {d} на фиг. 6) до вершины волны (точка e на фиг. 6) при движении ВППл вверх. Таким образом определяется амплитуда времени вертикальной качки при движении вверх - время T2 на фиг. 6.
При бортовой, продольной и вертикальной качках к работе подключаются программно-вычислительные модули, с помощью которых определяется положение центра ВППл с учетом места расположения центра ВППл на палубе корабля и параметров качки, задаваемых навигационной корабельной системой 3.
При величинах вертикальной качки в пределах, допустимых для конкретного типа вертолета, световые лини 1.1.3.3 и 1.1.3.4 устанавливаются у центра информационного поля индикатора вертикального перемещения 1.1.3 независимо от направления качки. Символы направления движения центра ВППл 1.1.3.1 и 1.1.3.2 выключаются.
Преимущество предложенного технического решения состоит в том, что летчику предоставляется информация об истинной вертикали от верхней точки нахождения вертолета при посадке до точки причаливания и наглядном представлении времени, которым может располагать летчик при принятии решения на причаливание вертолета к ВППл. При этом он может действовать автоматически на причаливание, когда палуба движется вниз и информационное поле индикатора времени вертикальной качки центра ВППл оказывается в положении, параллельном или близком к параллельному с планкой указателя истинной вертикали.
Техническо-экономическим эффектом полезной модели является повышение безопасности посадки вертолета на корабельную ВППл днем и ночью при бортовой, килевой и вертикальной качках корабля при улучшении технико-эксплуатационных характеристик ИИВиВрП.
Формула полезной модели
1. Индикатор истинной вертикали и времени вертикальной качки центра ВППл, содержащий экран светодиодный цветной с пиксельной структурой матрицы, в информационное поле которого встроены в верхней части экрана информационное поле шкалы индикатора бортовой качки, информационное поле индикатора располагаемого времени летчиком для принятия решения на причаливание вертолета на ВППл, световую планку ориентации летчика в пространстве при посадке на корабельную ВППл, промышленный компьютер с встроенным в него вычислительным блоком, который с одной стороны подключен с помощью проводной линии связи к корабельной навигационной системе, которая обеспечивает выдачу текущих значений параметров бортовой, килевой и вертикальной качек, и с другой - к экрану светодиодному цветному и в вычислительный блок которого встроены программно-вычислительные модули, модуль задания уровней яркости светодиодов светового экрана, модуль формирования шкалы индикатора бортовой качки, а экран и пульт подключены к источникам электропитания, отличающийся тем, что световая планка ориентации летчика в пространстве при посадке на корабельную ВППл выполнена в виде световой планки указателя истинной вертикали, расположенная на информационном поле экрана вертикально, а для ее формирования и управления угловым положением в вычислительный блок пульта введены программно-вычислительные модули, модуль формирования световой планки указателя истинной вертикали, модуль преобразования информации, поступающей от навигационной системы в сигналы управления угловым положением световой планки указателя истинной вертикали, информационное поле индикатора располагаемого времени летчиком для принятия решения на причаливание вертолета на ВППл выполнен в виде прямоугольного информационного поля индикатора времени вертикальной качки центра ВППл и в него встроены символ индикации текущего значения времени вертикальной качки центра ВППл при движении вниз, символ индикации текущего значения времени вертикальной качки центра ВППл при движении вверх, световая линия индикации прогнозируемой величины времени вертикального перемещения центра ВППл от впадины до вершины волны, световая линия индикации прогнозируемой величины времени вертикального перемещения центра ВППл от вершины до впадины волны, причем в вычислительный блок пульта введены программно-вычислительные модули, модуль формирования световой планки указателя истинной вертикали, модуль преобразования информации, поступающей от навигационной системы в сигналы управления угловым положением световой планки указателя истинной вертикали, модуль формирования информационного поля индикатора времени вертикальной качки центра ВППл, модуль формирования символа индикации текущего времени вертикальной качки центра ВППл при движении вниз и управления его положением по высоте, модуль формирования символа индикации текущего времени вертикальной качки центра ВППл при движении вверх и управления его положением, модуль формирования световой линии индикации прогнозируемой величины времени перемещения от впадины до вершины, модуль формирования световой линии индикации прогнозируемой величины времени перемещения от вершины до впадины.
2. Индикатор истинной вертикали и времени вертикальной качки центра ВППл по п. 1, отличающийся тем, что в информационное поле экрана в нижней его части дополнительно встроено информационное поле шкалы индикации бортовой качки и шкала индикатора бортовой качки, а в вычислительный блок пульта введен программно-вычислительный модуль формирования шкалы нижней шкалы индикатора бортовой качки.
Написать продавцу




Благодарим за обращение!