-
О компании

Prilan - Международный Каталог патентных специалистов

Для клиентов: удобный поиск исполнителя в любом регионе

Для патентных специалистов: Поиск коллег в смежных областях и регионах

Бесплатные консультации по вопросам интеллектуальной собственности

Помощь в оказании услуг по защите интеллектуальной собственности

Поиск исполнителя на оказание услуг по защите интеллектуальной собственности

Бесплатные консультации по вопросам защиты изобретений

Оказание услуг по качественному оформлению прав на изобретения

Помощь в продаже изобретения и привлечения инвестора
Публикация профиля специалиста и его компетенций

Поиск заказчиков на услуги по защите интеллектуальной собственности

Удобное взаимодействие с коллегами из смежных областей и других стран
Патентование Услуги по Изобретениям, Полезным моделям, Промышленным образцам

Регистрация Услуги по Товарным знакам, Программному обеспечению, Авторскому праву
Исследования Услуги по Исследованиям по ГОСТ, Патентному поиску, Оценке, Разработке

Суды и споры Услуги по Защите в СИП, ФАС, Арбитраже, Аннулированию в ППС, Экспертиза
-
Услуги
 Регистрация товарного знака
Международная регистрация товарного знака (торговой марки)
Внесение и регистрация товарного знака в ТРОИС
Ускоренная регистрация товарного знака
Продление действия товарного знака
Регистрация лицензионного договора
Ответы на Уведомления при регистрации ТЗ
Регистрация программ для ЭВМ
Регистрация ПО и ПАК в Минцифры
Калькулятор стоимости регистрации товарного знака - торговой марки, логотипа, торгового знака
Калькулятор расчёта стоимости международной регистрации товарного знака по Мадридской системе
Патентование изобретений - регистрация патента в РФ
Патентование полезной модели - регистрация патента в РФ
Патентование промышленного образца - патент на внешний вид
Ускоренное патентование
Калькулятор расчёта стоимости патентования изобретения, полезной модели, промышленного образца
Международное патентование
Патентование промышленного образца в Евразии (ЕАПО)
Патентование изобретения в Евразии (ЕАПО)
Патентование и Регистрация интеллектуальной собственности
Проведение патентного исследования Патентные исследования на патентную чистоту Патентно-информационный поиск Оценка стоимости интеллектуальной собственности Оценка патента на изобретение, полезную модель, промышленный образец Оценка стоимости товарного знака Оценка программно-аппаратного комплекса, программ ЭВМ Разработка и регистрация технических условий (ТУ) Разработка и создание нематериального актива для компании (НМА)
Регистрация товарного знака
Международная регистрация товарного знака (торговой марки)
Внесение и регистрация товарного знака в ТРОИС
Ускоренная регистрация товарного знака
Продление действия товарного знака
Регистрация лицензионного договора
Ответы на Уведомления при регистрации ТЗ
Регистрация программ для ЭВМ
Регистрация ПО и ПАК в Минцифры
Калькулятор стоимости регистрации товарного знака - торговой марки, логотипа, торгового знака
Калькулятор расчёта стоимости международной регистрации товарного знака по Мадридской системе
Патентование изобретений - регистрация патента в РФ
Патентование полезной модели - регистрация патента в РФ
Патентование промышленного образца - патент на внешний вид
Ускоренное патентование
Калькулятор расчёта стоимости патентования изобретения, полезной модели, промышленного образца
Международное патентование
Патентование промышленного образца в Евразии (ЕАПО)
Патентование изобретения в Евразии (ЕАПО)
Патентование и Регистрация интеллектуальной собственности
Проведение патентного исследования Патентные исследования на патентную чистоту Патентно-информационный поиск Оценка стоимости интеллектуальной собственности Оценка патента на изобретение, полезную модель, промышленный образец Оценка стоимости товарного знака Оценка программно-аппаратного комплекса, программ ЭВМ Разработка и регистрация технических условий (ТУ) Разработка и создание нематериального актива для компании (НМА) - Специалисты
-
Инфо

Продажа товарного знака Новатор кофе
Классы: 30, 43
Цена: договорная

Продажа товарного знака Жажда Странствий
Классы: 3, 9, 16, 18, 20...
Цена: договорная

Продажа товарного знака ФитоЛавка
Классы: 5, 20, 21, 30, 35
Цена: договорная

Уникальная технология конструкции беседки
Авторские произведения
Отчуждение
Универсальная сумочка с FOLED-дисплеем
Полезная модель
Лицензия

ИС CloudRepairs по планированию и организации
Авторские произведения
Отчуждение
Инструменты для классификации ИС
- Классификатор МПК - Международная патентная классификация
- Классификатор МКТУ - Международная классификация товарных знаков и услуг
- Классификатор МКПО - Международная классификация промышленных образцов
- Классификатор ЕСКД - Единая система конструкторской документации
- Классификатор ОКВЭД2 - Общероссийская классификация видов экономической деятельности
- Классификатор ПАК - Классификация программно-аппаратных комплексов
- Классификатор ПО - Классификация программного обеспечения
Prilan - Официальный партнёр Сбербанка России

Адрес:
123610 г. Москва, Краснопресненская набережная, д.12
ЦМТ Москвы - Центр международной торговли
График работы:
09:00-18:00 - ПН-ПТ
Выходные - СБ-ВС
























Патент №123200 ИНДИКАТОР ВЕРТИКАЛЬНОГО ПЕРЕМЕЩЕНИЯ КОРАБЕЛЬНОЙ ВЗЛЕТНО-ПОСАДОЧНОЙ ПЛОЩАДКИ


Вид объекта: Полезная модель
Вид регистрации: Патент
Цена: 384 000 р.
Продавец: Олег Вячеславович Резниченко
Телефон: +7 (xxx)xxx-xx-xx
E-mail: xxxx@xxxx.ru
Изображения:
Дата начала отсчета срока действия патента:
29.02.2012
Приоритет(ы):
(22) Дата подачи заявки: 29.02.2012
(45) Опубликовано: 20.12.2012 Бюл. № 35
Адрес для переписки:
140185, Московская обл., г. Жуковский, а/я 702, ЗАО Научно-технический центр "Альфа-М", генеральному директору А.Е. Цветкову
(72) Автор(ы):
Тяпченко Юрий Александрович (RU),
Икрянов Игнат Иванович (RU),
Великовский Михаил Вениаминович (RU)
(73) Патентообладатель(и):
Закрытое акционерное общество Научно-технический центр "Альфа-М" (RU)
(54) ИНДИКАТОР ВЕРТИКАЛЬНОГО ПЕРЕМЕЩЕНИЯ КОРАБЕЛЬНОЙ ВЗЛЕТНО-ПОСАДОЧНОЙ ПЛОЩАДКИ
(57) Реферат:
Индикатор вертикального перемещения корабельной взлетно-посадочной площадки, содержащий информационное поле №1, на котором с помощью светодиодов построена двунаправленная шкала высоты вертикального перемещения центра взлетно-посадочной площадки, информационное поле №2 индикации положения взлетно-посадочной площадки относительно шкалы, расположенное параллельно информационному полю шкалы и состоящее из вертикального ряда светодиодов, ЭВМ, имеющую два входа и один выход, причем первый вход, подключен по мультиплексному каналу связи к навигационной системе, второй вход подключен к источнику питания, отличающийся тем, что информационное поле №1 выполнено в виде прямоугольной светодиодной матрицы с строчной структурой, в котором каждая строка состоит из светодиодов одного цвета, например желтых или зеленых, информационное поле №2 выполнено в виде прямоугольной светодиодной матрицы с строчной структурой, в котором каждая строка состоит из чередующихся цветных светодиодов, например, красного, зеленого и желтого цветов, и на информационном поле №2 выделены: блок переменной высоты №1, управляемый ЭВМ по высоте и положению и состоящий из строк светодиодов одного цвета, например зеленого, верхняя граница которого определяется текущим, а нижняя прогнозируемым положением взлетно-посадочной площадки при движении взлетно-посадочной площадки вниз, блок переменной высоты №2, управляемый ЭВМ по высоте и положению и состоящий из строк светодиодов одного цвета, например красного, нижняя граница которого определяется текущим, а верхняя прогнозируемым положением взлетно-посадочной площадки при движении взлетно-посадочной площадки вверх, блок постоянной высоты №3, состоящий из двух-трех строк светодиодов одного цвета, например желтого, привязка которого по положению выполняется ЭВМ к нижней границе внутри блока №1 при движении взлетно-посадочной площадки вниз и к верхней границе внутри блока №2 при движении взлетно-посадочной площадки вверх, второй выход ЭВМ имеет интерфейс для обмена информацией по мультиплексному каналу и подключен к входу индикатора вертикального перемещения, в ЭВМ введены программные модули вычисления прогнозных значений положения взлетно-посадочной площадки, точек, предшествующих изменению направления движения взлетно-посадочной площадки и модули управления высотой блоков №1, №2 и положением №3, в индикаторе вертикального перемещения применена схема управления светодиодами с адресным избиранием каждого светодиода в информационных полях №1 и №2 или светодиодов одного цвета в каждой строке информационного поля №2 или всех светодиодов одновременно в информационном поле №1, в индикатор вертикального перемещения введен блок питания светодиодов с дистанционно задаваемой величиной выходного напряжения.
Полезная модель относится к авиационной технике, преимущественно морской авиации, и может быть использовано для обеспечения визуальной посадки вертолета на корабельную взлетно-посадочную площадку (ВППл) днем и ночью, при бортовой и килевой качках, в простых и сложных метеоусловиях за счет повышения технических характеристик и уровня информированности летчика при визуальном способе приземления вертолета на корабельные ВППл.
Для летчиков морской авиации наиболее сложной задачей полета на вертолете является задача приземления на качающуюся случайным образом ВППл движущегося корабля. Установлено, что наиболее безопасной посадка выполняется при нахождении корабля на гребне и подошве волны, а также при движении ВППл вниз. и при движении на дне волны вниз, а также на догоне ВППл и нижней части волны вниз и достаточность остатка времени, определяемого, как время, потребное на перемещение от текущего положения центра ВППл до завершения изменения направления движения.
На многих кораблях посадка выполняется летчиками вручную визуально. Без светотехнического оборудования визуальная посадка ночью невозможна. Поэтому для повышения безопасности полета на этом этапе разрабатываются различные средства информационного обеспечения летчика.
Известен индикатор посадочный палубный (см., патент RU №85719 МПК G08G 05/02, публикация от 10.08.2009).
В состав индикатора посадочного палубного входят:
- индикатор крена;
- индикатор вертикального перемещения центра ВППл;
- цифровой индикатор времени, оставшегося для выполнения безопасного приземления вертолета на ВППл;
- фундамент, на котором размещены индикатор крена и ИВП в виде буквы “Т” и цифровой индикатор времени,
- пульт управления;
- блок вычислительный;
- устройство обмена информацией;
Индикатор крена, ИВП и цифровой индикатор времени представляет собой моноблоки, в каждый из которого входят: световые элементы для отображения информации, блок регулировки яркости световых элементов, блок коммутации питания световых элементов, контроллер.
Световые элементы индикатора крена конструктивно объединены в единую информационную панель индикатора крена. Информационная панель состоит из цветных светодиодных пикселей со структурой 2G, B, R световых элементов в пикселе, образующих прямоугольную матрицу светодиодов.
Матрица делится на группы светодиодов для отображения:
- контура индикатора крена,
- двух двухсторонних шкал с нулевыми значениями посредине,
- двухсторонней горизонтально расположенной столбчатой диаграммы индикации текущего положения ВППл влево и вправо по крену,
- предупредительной сигнализации о приближении к крену, опасному для посадки,
- сигнализации крена, опасного для посадки.
Светодиоды контура информационной панели и шкал горят постоянно после включения индикатора. Остальные светодиоды включаются в соответствии с величиной крена, информация о котором поступает от навигационной корабельной системы.
Световые элементы ИВП центра взлетно-посадочной площадки конструктивно объединены в единую информационную панель. Информационная панель состоит из цветных светодиодных пикселей со структурой 2G, B, R световых элементов в пикселе, образующих прямоугольную матрицу.
Матрица делится на группы светодиодов для отображения:
- контура ИВП зеленого цвета.
- двух двухсторонних шкал высоты ВППл с нулевыми значениями посредине желтого цвета.
- двухсторонней вертикально расположенной столбчатой диаграммы индикации расчетной величины размаха вертикального перемещения ВППл и ее текущего положения красного цвета при движении ВППл вверх и зеленого цвета при движении вниз,
- контура поля отображения двухсторонней вертикально расположенной столбчатой диаграммы зеленого цвета при движении ВППл вниз и красного цвета при движении ВППл вверх,
- предупредительной сигнализации о приближении к точке изменения направления движения с разрешенного на запрещающее.
Цифровой индикатор времени представляет собой моноблок, в котором на лицевой панели размещена матрица светодиодных пикселей примерно с такой же структурой, как и в индикаторах крена и вертикального перемещения. Размер матрицы в пикселях обеспечивает отображение двухразрядных чисел на двух знакоместах.
Индикатор крена, индикатор вертикального перемещения и цифровой индикатор времени размещаются на фундаменте. При этом индикатор вертикального перемещения располагается перпендикулярно индикатору крена по центру, образуя по форме букву "Т". Цифровой индикатор времени может размещаться как слева, так и справа от индикатора вертикального перемещения.
Индикатор посадочный палубный работает следующим образом.
На индикатор посадочный палубный подано электрическое питание. Пульт управления включен и активирован. Проведена тестовая проверка всех составных частей индикатора.
С пульта управления задаются:
- уровень яркости светодиодов,
- диапазон изменения значений углов крена для заданного типа вертолетов и корабля,
- значения углов крена, при которых включаются желтые и соответственно красные световые элементы слева и справа от центральной метки на индикаторе крена,
- диапазон изменения (амплитуда) значений вертикального перемещения ВППл в точке посадки вертолета на ВППл корабля в метрах,
- координаты размещения центра ВППл;
- координаты точки в корабельной системе координат, для которой навигационная система определяет угол дифферента и величину вертикального перемещения;
При отсутствии качки от навигационной системы в вычислительный блок по мультиплексному каналу через устройство обмена информации, передается информация о нулевых значениях параметров крена, дифферента и вертикального перемещения корабля.
Вычислительный блок передает информацию о нулевых значениях параметров крена в контроллер индикатора крена, параметров вертикального перемещения в контроллеры индикатора вертикального перемещения и цифрового индикатора времени.
На индикатор крена и ИВП включаются световые элементы контуров и шкал в режим постоянного горения. На информационном поле второго знакоместа цифрового индикатора времени включаются светодиоды зеленого цвета во всех пикселях - разрешение посадки вертолета на ВППл без ограничений по времени;
При крене влево на индикаторе крена последовательно с накоплением включаются ряды левой части зеленых светодиодов индикации текущего положения ВППл при крене влево. Желтые и красные световые элементы включаются при углах крена больше заданных.
Команды на включение рядов светодиодов выдаются вычислительным блоком.
Для индикации вертикального перемещения ВППл на индикаторе вертикального перемещения вычислительный блок производит обработку информации по качке корабля, которая поступает от навигационной системы, вычисляет величину вертикального перемещения центра ВППл по соответствующей формуле и через устройство обмена информацией и интерфейсный блок выдает команды в контроллер индикатора вертикального перемещения ВППл на включение светодиодов столбчатой диаграммы с размахом, равным вычисленной (прогнозной) величине вертикального перемещения центра ВППл.
При движении ВППл вниз включаются ряды светодиодов столбчатой диаграммы зеленого цвета
Вычислительный блок определяет значение амплитуды вертикального перемещения по результатам предыдущего цикла и, получая от навигационной системы текущие значения качки, определяет момент, когда разность между положением ВППл в нижней точке и текущим положением станет меньше заданной, выдает команду на включение ряда светодиодов желтого цвета на столбчатой диаграмме, сигнализирующих приближение ВППл к нижней точке волны и при скорости движения ВППл, равной нулю, - команду на включение светодиодов красного цвета столбчатой диаграммы с размахом, равным прогнозируемому размаху вертикального перемещения ВППл. Зеленые светодиоды контура ИВП выключаются.
При движении ВППл вверх выключаются светодиоды контура информационного поля ИВП зеленого цвета и включаются светодиоды этого контура красного цвета. Далее ряды светодиодов красного цвета выключаются в соответствии с перемещением ВППл.
На цифровом индикаторе отображается вычисленное время, оставшееся до наступления события, при котором ВППл займет горизонтальное положение и будет двигаться вниз.
К недостаткам этого устройства относятся: многоблочность; трудность восприятия информации на фоне меняющегося цвета шкал ИВП; трудность считывания информации при наличии двух шкал индикаторов крена и ИВП; трудность восприятия информации при одновременном применении аналогового и цифрового способов отображения информации. Многоблочность и необходимость формирования индикатора непосредственно на месте его применения увеличивают трудоемкость изготовления корабля и отладки индикатора во взаимодействии с корабельной навигационной системой.
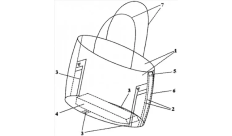
Известен индикатор вертикального перемещения (см. Оптическая система посадки вертолета ОСПВ-20380. НКУГ.461523.001РЭ. 2006 г), принятый за прототип. Внешний вид собранного индикатора вертикального перемещения ИВП показан на фиг.1.
Он состоит из нижней секции световых модулей 1, базового светового модуля 2 и верхней секции световых модулей 3. Секция 3 состоит из шести световых модулей 4, каждый из которых состоит из одного светодиодного огня желтого цвета, расположенного вверху модуля на правой его стороне, и четырех вертикально расположенных светодиодных огней зеленого цвета, которые расположены слева от желтого.
Базовый модуль 2 состоят из трех светодиодных огней желтого цвета 6, которые расположены в ряд огней перпендикулярно огням секций.
Нижняя секция 1, также как и верхняя, состоит из шести световых модулей 7, каждый из которых состоит из одного светодиодного огня желтого цвета расположенного внизу модуля на правой его стороне, и четырех вертикально расположенных светодиодных огней зеленого цвета, которые расположены слева от желтого. Модули нижней секции по конструкции являются зеркальным отображением модулей верхней секции.
В собранном виде устройство представляет собой вертикально расположенный шкальный индикатор размером примерно 2 м по высоте и 20 см по ширине. Вдоль одной стороны индикатора расположена линейка желтых светодиодов, каждый из которых является меткой шкалы. Параллельно линейке светодиодов шкалы расположена линейка зеленых светодиодов, которые предназначены для индикации текущего положения ВППл. Количество светодиодов в этой линейке в четыре раза больше количества светодиодов шкалы. Эти светодиоды делят расстояние между светодиодами шкалы на четыре равных части.
В собранном виде индикатор представляет собой функционально законченное устройство отображения информации о вертикальном перемещении корабельной вертолетной взлетно-посадочной площадки, содержащее двухстороннюю шкалу индикаторного устройства в виде линейки постоянно включенных светодиодов с риской посредине вертикали и размеченную шкалу индикации текущего положения ВППл. Условно информационное поле индикатора состоит из двух информационных полей:
- первое информационное поле - информационное поле шкалы,
- второе информационное поле - информационное поле отображения параметров вертикального перемещения ВППл.
Электрически все световые модули и базовый световой модуль с помощью кабельной сети 9 подключены к выходам блока управления светодиодами. Вход блока управления подключен к выходам корабельной навигационной системы и системе электропитания.
На вход блока управления от навигационной системы по мультиплексной линии связи поступают данные о величине и направлении бортовой, килевой и вертикальной качках корабля. В блоке управления данные подвергаются обработке и преобразованию по заданному алгоритму в сигналы управления огнями. При этом огни шкалы 5 и базовые огни шкалы 6 после включения устройства горят постоянно, а огни шкалы индикации текущего положения 8 включаются поочередно в зависимости от положения центра ВППл по вертикали.
К недостаткам рассматриваемого индикатора вертикального перемещения относятся: принятая электрическая схема управления светодиодами шкалы текущего положения, исключающая включение каких-либо других светодиодов на данной шкале; трудность обнаружения в условиях реального полета движущейся световой точки на фоне шкалы; невозможность определения размаха вертикального перемещения ВППл и моментов изменения направления движения и тем самым трудность прогнозирования принятия решения на приземление вертолета; отсутствие в индикаторе средств регулировки яркости светодиодов, что при подлете при максимальной яркости светодиодов делает их при посадке для летчика слепящими.
Задачей изобретения является устранение недостатков вышеуказанного индикатора вертикального перемещения.
Техническим результатом предлагаемого решения является повышение функциональной возможности индикатора и безопасности посадки вертолета особенно ночью в условиях качки корабля за счет.
- применения построчной структуры информационного поля 1 со светодиодами одного цвета в каждой строке, например желтого или зеленого цвета,
- применения построчной структуры информационного поля 2 с чередующимися цветными, по крайней мере трех цветов, светодиодами в каждой строке,
- выделения на информационном поле №2 блока переменной высоты, состоящего из строк светодиодов цвета №1, например зеленых, для отображения в виде столбчатой диаграммы с началом в строке текущего положения ВППл и в конце в строке прогнозируемой величины вертикального перемещения при движении ВППл вниз, и цветом №2, например красным, при движении ВППл вверх,
- выделения на информационном поле 2 строк светодиодов предупреждения летчика об изменении направления движения снизу вверх или сверху вниз цветом №3, например желтым,
- введения в ЭВМ модуля вычисления прогнозных значений положения ВППл и точек, предшествующих изменению направления движения ВППл
- применения схемы управления светодиодами с адресным избиранием каждого светодиода в информационных полях №1 и №2 или светодиодов одного цвета в каждой строке информационного поля №2 или всех светодиодов одновременно в информационном поле №2,
- введения в ИВП блока питания светодиодов с дистанционно задаваемой величиной выходного напряжения.
Технический результат достигается тем, что индикатор посадочный палубный, содержащий:
- информационное поле 1, на котором с помощью светодиодов построена двунаправленная шкала высоты вертикального перемещения центра ВППл с рисками с использованием светящихся элементов, например, светодиодов;
- информационное поле 2 индикации положения ВППл относительно шкалы, расположенное параллельно информационному полю шкалы и состоящее из вертикального ряда светодиодов;
- ЭВМ, имеющую два входа и один выход, причем первый вход, подключен по мультиплексному каналу связи к навигационной системе, второй вход подключен к источнику питания;
- информационное поле 1 выполнено в виде прямоугольной светодиодной матрицы с строчной структурой, в котором каждая строка состоит из светодиодов одного цвета, например желтых или зеленых;
- информационное поле №2 выполнено в виде прямоугольной светодиодной матрицы с строчной структурой, в котором каждая строка состоит из чередующихся цветных светодиодов, например красного, зеленого и желтого цветов,
- на информационном поле №2 выделены:
- блок переменной высоты №1, управляемый ЭВМ по высоте и положению и состоящий из строк светодиодов одного цвета, например зеленого, верхняя граница которого определяется текущим, а нижняя прогнозируемым положением ВППл при движении ВППл вниз,
- блок переменной высоты №2, управляемый ЭВМ по высоте и положению и состоящий из строк светодиодов одного цвета, например красного, нижняя граница которого определяется текущим, а верхняя прогнозируемым положением ВППл при движении ВППл вверх,
- блок постоянной высоты №3, состоящий из двух-трех строк светодиодов одного цвета, например желтого, привязка которого по положению выполняется ЭВМ к нижней границе внутри блока №1 при движении ВППл вниз и к верхней границе внутри блока №2 при движении ВППл вверх;
- второй выход ЭВМ имеет интерфейс для обмена информацией по мультиплексному каналу и подключен к входу ИВП,
- в ЭВМ введены модули вычисления прогнозных значений положения ВППл, точек, предшествующих изменению направления движения ВППл и модули управления высотой блоков №1, №2 и положением блока №3;
- в ИВП применена схема управления светодиодами с адресным избиранием каждого светодиода в информационных полях №1 и №2 или светодиодов одного цвета в каждой строке информационного поля №2 или всех светодиодов одновременно в информационном поле №1,
- в ИВП введен блока питания светодиодов с дистанционно задаваемой величиной выходного напряжения.
Сравнение предлагаемого решения с известными техническими решениями показывает, что оно обладает новой совокупностью существенных признаков, которые совместно с известными признаками позволяют успешно реализовать поставленную цель.
Поставленная задача достигается тем, что в известном индикаторе на втором информационном поле размещают дополнительно к зеленым светодиодам светодиоды двух хорошо различимых между собой и с зеленым цветом светодиоды, например, желтого и красного цветов в каждой строке зеленых светодиодов, а вычислительное устройство по данным навигационной системы определяет прогнозируемую величину вертикального перемещения ВППл и в соответствии с этим на втором информационном поле включает столбчатую диаграмму, состоящую из группы светодиодов по вертикали высотой пропорциональной расчетной высоте вертикального перемещения ВППл зеленого цвета при движении ВППл вниз и красного цвета при движении ВППл вверх, а при приближении к верхней или нижней линиям столбчатой диаграммы включает линии светодиодов желтого цвета, предупреждающие летчика об изменении направления движения ВППл.
Благодаря отображению вертикального перемещения ВППл в виде столбчатой диаграммы и применения цветового кодирования информации о движении ВППл повышается уровень информированности летчика для принятия решения о приземлении вертолета.
На фиг.2 показана структурная схема ИВП;
На фиг.3 показана структурная схема модуля отображения ИВП;
На фиг.4 показана структура информационной панели модуля отображения ИВП в режиме тестового контроля;
На фиг.5 показана структура информационной панели модуля отображения ИВП с включенной шкалой;
На Фиг.6 показан вид панели модуля отображения ИВП при движении ВППл вниз - начало движения;
На Фиг.7 показан вид панели модуля отображения ИВП при положении ВППл перед изменением направления движения снизу вверх;
На Фиг.8 показан вид панели модуля отображения ИВП при движении ВППл вверх - начало движения;
На Фиг.9 показан вид панели модуля отображения ИВП при положении ВППл перед изменением направления движения сверху вниз;
Обозначения к фиг.2-9:
10. Навигационная система (в состав индикатора не входит);
11. Мультиплексные каналы информационного обмена;
12. ЭВМ;
13. Модуль отображения информации индикатора вертикального перемещения;
13.1. Информационное поле индикации шкалы;
13.1.1. Блок светодиодов шкалы;
13.2. Информационное поле индикации вертикального положения центра ВППл;
13.2.1. Блок зеленых светодиодов;
13.2.2. Блок красных светодиодов;
13.2.3. Блок желтых светодиодов;
13.3. Приемник данных от ЭВМ;
13.4. Контроллер;
14. Кабели питания;
15. Блок питания;
16. Пульт управления (в состав индикатора не входит);
Индикатор работает следующим образом.
После подачи питания на индикатор питание от блока питания 15 на ЭВМ 12 и модуль отображения информации индикатора вертикального перемещения 13. На информационном поле индикации шкалы 13.1 включаются светодиоды блока светодиодов шкалы. При поступлении данных о параметрах качки корабля от навигационной системы 10 ЭВМ 12 преобразует данные в сигналы управления светодиодами информационного поля индикации вертикального положения центра ВППл 13.1. Если ВППл движется вниз, то включаются светодиоды блока зеленых светодиодов 13.1.1, образуя столбчатую диаграмму. Верхний ряд светодиодов - это текущее положение ВППЛ, нижний ряд светодиодов - это прогнозируемое положение ВППл при ее движении вниз. Строки светодиодов гаснут сверху вниз по мере перемещения ВППл. При приближении к нижней точке волны вместо двух трех строк зеленых светодиодов включаются светодиоды блока желтых светодиодов 13.3, которые горят до изменения направления движения ВППл. При движении ВППл вверх включаются светодиоды блока красных светодиодов 13.2.2, образуя столбчатую диаграмму красного цвета. Нижняя граница - это текущее положение ВППл, верхняя строка - это прогнозируемое положение ВППл при движении ее вверх.
Перед изменением направления движения ЭВМ 12 подает команду на включение двух-трех верхних рядов светодиодов блока желтых светодиодов 13.2.3, которые горят до изменения направления движения ВППл. Далее цикл повторяется. При этом время горения светодиодов блока желтых светодиодов может больше времени достижения верхней или нижних точек. В это время может входить время движения по впадине волны или по верхушке волны. Это определяется выбором соответствующего алгоритма обработки информации, выбор которого не является предметом рассмотрения в настоящем описании. Величина периода качки корректируется вычислителем непрерывно.
Преимущество изобретения состоит в том, что летчику предоставляется информация о вертикальном положении ВППл в виде и объеме, достаточном для своевременного принятия решения на припалубливание вертолета на корабельную ВППл.
Техническо-экономическим эффектом полезной модели является повышение безопасности посадки вертолета на корабельную ВППл днем и ночью при бортовой, килевой и вертикальной качках корабля при существенном улучшении технико-эксплуатационных характеристик индикатора параметров качки.
Формула полезной модели
Индикатор вертикального перемещения корабельной взлетно-посадочной площадки, содержащий информационное поле №1, на котором с помощью светодиодов построена двунаправленная шкала высоты вертикального перемещения центра взлетно-посадочной площадки, информационное поле №2 индикации положения взлетно-посадочной площадки относительно шкалы, расположенное параллельно информационному полю шкалы и состоящее из вертикального ряда светодиодов, ЭВМ, имеющую два входа и один выход, причем первый вход, подключен по мультиплексному каналу связи к навигационной системе, второй вход подключен к источнику питания, отличающийся тем, что информационное поле №1 выполнено в виде прямоугольной светодиодной матрицы с строчной структурой, в котором каждая строка состоит из светодиодов одного цвета, например желтых или зеленых, информационное поле №2 выполнено в виде прямоугольной светодиодной матрицы с строчной структурой, в котором каждая строка состоит из чередующихся цветных светодиодов, например, красного, зеленого и желтого цветов, и на информационном поле №2 выделены: блок переменной высоты №1, управляемый ЭВМ по высоте и положению и состоящий из строк светодиодов одного цвета, например зеленого, верхняя граница которого определяется текущим, а нижняя прогнозируемым положением взлетно-посадочной площадки при движении взлетно-посадочной площадки вниз, блок переменной высоты №2, управляемый ЭВМ по высоте и положению и состоящий из строк светодиодов одного цвета, например красного, нижняя граница которого определяется текущим, а верхняя прогнозируемым положением взлетно-посадочной площадки при движении взлетно-посадочной площадки вверх, блок постоянной высоты №3, состоящий из двух-трех строк светодиодов одного цвета, например желтого, привязка которого по положению выполняется ЭВМ к нижней границе внутри блока №1 при движении взлетно-посадочной площадки вниз и к верхней границе внутри блока №2 при движении взлетно-посадочной площадки вверх, второй выход ЭВМ имеет интерфейс для обмена информацией по мультиплексному каналу и подключен к входу индикатора вертикального перемещения, в ЭВМ введены программные модули вычисления прогнозных значений положения взлетно-посадочной площадки, точек, предшествующих изменению направления движения взлетно-посадочной площадки и модули управления высотой блоков №1, №2 и положением №3, в индикаторе вертикального перемещения применена схема управления светодиодами с адресным избиранием каждого светодиода в информационных полях №1 и №2 или светодиодов одного цвета в каждой строке информационного поля №2 или всех светодиодов одновременно в информационном поле №1, в индикатор вертикального перемещения введен блок питания светодиодов с дистанционно задаваемой величиной выходного напряжения
Написать продавцу




Благодарим за обращение!